
一、前言
机械转子式陀螺仪在很长的一段时间内都是唯一的选项,也正是因为它的结构和原理,使其不再适用于现代小型、单体、集成式传感器的设计。常规的机械转子式陀螺仪包括平衡环、支撑轴承、电机和转子等部件,这些部件需要精密加工和组装,这些结构特性限制了常规机械陀螺仪向低成本,小型化装置的发展。
运行期间电机和轴承的磨损,意味着这种陀螺仪只能在有限数量的运行时间内满足其性能指标。如今已经开发出了其它用于感应方向和速度的方法。GPS就是一个比较理想选择。但是在太空、水下、隧道内、建筑物里,GPS就没办法了。
MEMS微机械加工技术的应用,能够设计出用振动组件代替旋转盘的微型陀螺仪。这种设计利用了电子工业开发出来的技术,十分适合于大规模制造。此外,振动陀螺仪更具有稳定性,能够承受众多军事和航空航天应用的典型环境特点。
二、振动陀螺仪原理
所有振动陀螺仪都依赖于科里奥利加速度现象。科里奥利效应是一种惯性力,是十九世纪法国工程师兼数学家古斯塔夫-加斯帕尔·科里奥利于1835年阐述的。科里奥利指出,如果把物体运动的一般牛顿定律用于旋转参照系,一种惯性力,对于逆时针旋转的参照系,该力向物体运动方向的右侧作用,顺时针旋转则向左侧作用,必须包括在运动方程之中。
物体在参照系中做直线运动,参照系则围绕垂直于运动直线的轴旋转,此时即出现物体的科里奥利加速度。此时产生的正比于转动速度的加速度,出现在垂直于包含其它两轴的平面的第三轴(图2a)。在微机械加工陀螺仪中,旋转由振动替代,产生能够测量的、与运动速度有关的加速度,取代传统机械转子式陀螺仪中按圆形轨迹旋转的质量体的,是能够悬置并且以简谐运动做直线移动的质量体。
构建振动陀螺仪有几个实用方法,可分为三种原理类型:
1、简单振荡器(弦、梁上的质量体)
2、平衡振荡器(音叉式)
3、壳体谐振器(酒杯式,圆柱状,圆环)
所有三个类别都已应用于实际设计。
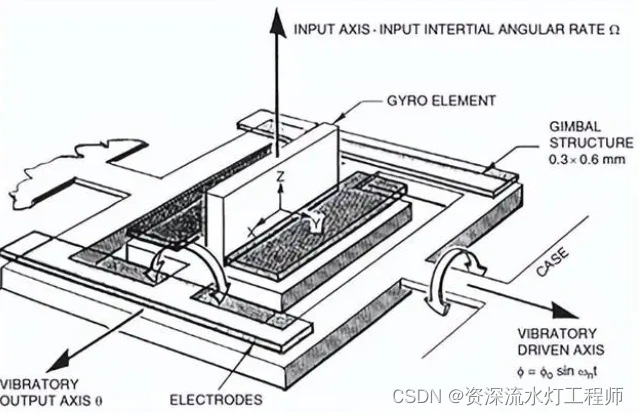
图1 振动速率式陀螺仪概念图
首次出现的此类装置之一,是由扭转屈曲部分支撑的双平衡架结构(图1)。平衡架由底切形成,在有效区域内自由运动。工作时,通过相距很近的电极产生的静电扭矩,以恒定幅度驱动起到“马达”作用的外平衡架。这种振动沿内部扭转屈曲的刚性轴传递至内平衡架,使惯性组件建立起振荡动量矢量。在垂直于装置平面存在旋转角速度时,科里奥利力将引起内平衡架围绕其弱轴发生振动,振动的频率等于驱动频率,振动的幅度正比于惯性输入速率。
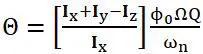
以内平衡架的谐振频率驱动外平衡架时,得到最大分辨率。输出运动的读出,通过确定内平衡架和一对电极之间的电容值的不同变化来实现。开环工作时,内平衡架围绕输出轴的角位移正比于输入速率。即输出角Q正比于惯性比例项、驱动角ϕ0、力学特性Q和输入速率Ω。反比于驱动频率ωn。
在实际应用中,装置以闭环工作,内平衡架在相位和正交分量上都会重新平衡至零。新近的一种也属于第三类别的设计,由英国宇航系统公司与其合作者住友精密工业有限公司研发。此设计基于在硅中经微机械加工制备的环形谐振器。硅具有出色的机械特性,特别是在晶体状态时,硅具7GPa的断裂容限,高于绝大多数钢材。再加上其2330kg/m3的低密度,是一种十分坚固的材料。
陀螺仪谐振器由晶体硅材料蚀刻而成。这可确保谐振器的性能在使用期限和环境内保持稳定。平面振动环结构在一个平面内就具有全部的振动能量。由此,在角速度下,不存在由一个晶面至另一个的耦合振动,所以振动参量相对于温度十分稳定。
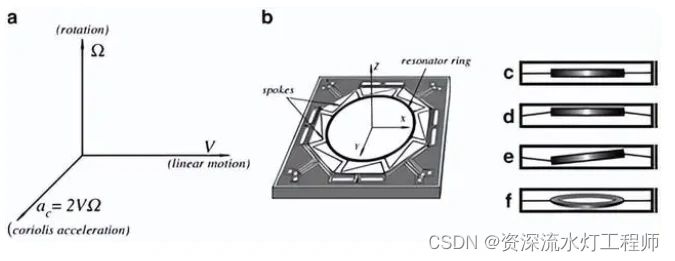 图2 a,科里奥利加速度
图2 a,科里奥利加速度
b,微机械加工制备的振动环结构
c,加速度对环的振动模式的影响
为了使谐振器正确运作,必须以使其尽可能自由振动的方式进行支撑。感应组件示于图2b。谐振器包含一个6mm的硅环,由八个放射状分布的柔性轮辐支架支撑,轮辐支架固定在10×10mm的支撑框架上。带电导体只在上表面淀积和图形化制备,用于导线键合的引脚位于外支撑框架。
芯片经阳极键合至与硅热匹配的支撑玻璃结构。有八个完全相同的导电回路,每个遵循的路径为:连线引脚-->沿支架的长度绕过环的1/8部分-->沿下一个支架的长度-->下一个连线引脚。这样每个支架包含两条导线,各在相邻回路,此外还有位于前两条导线之间的第三条导线,用于使电容耦合最小化。谐振器可由任何合适的换能器激发进入振动。例如借助于光、热膨胀、压电、静电或电磁等各种效应都能起作用。激发作用可加至携带谐振器的支撑结构,或直接加至谐振器本身。其基本振动模式在14.5kHz。
图2 c~f表示直线加速度和角加速度对谐振器的影响。图2c表示无加速度条件下的侧视图,图2d表示z轴直线加速度的影响,图2e表示围绕y轴的角加速度的影响,图2f表示围绕x轴的角加速度的影响。因为环的位置相对于框架发生改变,所需要的就是与位移相结合的检测变换器,以探测谐振器的特定移动。举例来说,对谐振器振动的感应可由工作于电磁式、电容式、光学式、压电式的变换器实现,或利用应力计实现。这里介绍的这个特殊设计中,利用了带有磁场的图形化制备的导电回路实现的电磁式拾波,该磁场垂直于环的平面。由钐钴磁铁产生磁场,整个结构则封装在标准的IC圆形密封金属壳内。