
整个Arduino系列的学习汇总链接如下:
https://github.com/GreyZhang/g_arduino
感觉Arduino做一个小工具实现起来特别容易,逐渐成了我的一个测试小助手。也很容易做成小的快速原型机,做一些功能测试。
工作中CAN使用的比较多,但是我的Arduino小板子上没有,找了一下找到一款SPI转CAN的工具。使用的是MCP2515的一个转换工具,砍了下Arduino的库中也有相应的支持。测试了一下,功能实现比较容易。
首先直接运行了CAN的loopback模式,运行比较顺利。接着找了CAN分析仪,我使用的是Kvaser的一个CAN卡,测试了一下收发功能。
测试代码如下:
//——————————————————————————————————————————————————————————————————————————————
// ACAN2515 Demo in loopback mode
//——————————————————————————————————————————————————————————————————————————————
#include <ACAN2515.h>
//——————————————————————————————————————————————————————————————————————————————
// MCP2515 connections:
// - standard SPI pins for SCK, MOSI and MISO
// - a digital output for CS
// - interrupt input pin for INT
//——————————————————————————————————————————————————————————————————————————————
// If you use CAN-BUS shield (http://wiki.seeedstudio.com/CAN-BUS_Shield_V2.0/) with Arduino Uno,
// use B connections for MISO, MOSI, SCK, #9 or #10 for CS (as you want),
// #2 or #3 for INT (as you want).
//——————————————————————————————————————————————————————————————————————————————
static const byte MCP2515_CS = 10; // CS input of MCP2515 (adapt to your design)
static const byte MCP2515_INT = 3; // INT output of MCP2515 (adapt to your design)
//——————————————————————————————————————————————————————————————————————————————
// MCP2515 Driver object
//——————————————————————————————————————————————————————————————————————————————
ACAN2515 can(MCP2515_CS, SPI, MCP2515_INT);
//——————————————————————————————————————————————————————————————————————————————
// MCP2515 Quartz: adapt to your design
//——————————————————————————————————————————————————————————————————————————————
static const uint32_t QUARTZ_FREQUENCY = 8UL * 1000UL * 1000UL; // 8 MHz
//——————————————————————————————————————————————————————————————————————————————
// SETUP
//——————————————————————————————————————————————————————————————————————————————
void setup()
{
//--- Start serial
Serial.begin(38400);
//--- Wait for serial (blink led at 10 Hz during waiting)
while (!Serial)
{
delay(50);
}
//--- Begin SPI
SPI.begin();
//--- Configure ACAN2515
Serial.println("Configure ACAN2515");
ACAN2515Settings settings(QUARTZ_FREQUENCY, 500UL * 1000UL); // CAN bit rate 500 kb/s
settings.mRequestedMode = ACAN2515Settings::NormalMode; // Select Normal mode
const uint16_t errorCode = can.begin(settings, [] { can.isr(); });
if (errorCode == 0)
{
Serial.print("Bit Rate prescaler: ");
Serial.println(settings.mBitRatePrescaler);
Serial.print("Propagation Segment: ");
Serial.println(settings.mPropagationSegment);
Serial.print("Phase segment 1: ");
Serial.println(settings.mPhaseSegment1);
Serial.print("Phase segment 2: ");
Serial.println(settings.mPhaseSegment2);
Serial.print("SJW: ");
Serial.println(settings.mSJW);
Serial.print("Triple Sampling: ");
Serial.println(settings.mTripleSampling ? "yes" : "no");
Serial.print("Actual bit rate: ");
Serial.print(settings.actualBitRate());
Serial.println(" bit/s");
Serial.print("Exact bit rate ? ");
Serial.println(settings.exactBitRate() ? "yes" : "no");
Serial.print("Sample point: ");
Serial.print(settings.samplePointFromBitStart());
Serial.println("%");
}
else
{
Serial.print("Configuration error 0x");
Serial.println(errorCode, HEX);
}
}
//------------------------------------------------------------------------------
#define DEBUG_MODE 1
CANMessage frame_tx;
CANMessage frame_rx;
char putc_char;
int counter = 0;
//——————————————————————————————————————————————————————————————————————————————
void loop()
{
#if DEBUG_MODE
frame_tx.len = 8;
frame_tx.ext = false;
frame_tx.rtr = false;
frame_tx.idx = 0x0;
frame_tx.data[0] += 1U;
if (can.tryToSend(frame_tx))
{
Serial.println(counter++);
}
delay(100);
if (can.available())
{
can.receive(frame_rx);
{
frame_tx.id = frame_rx.id;
}
}
#endif
}
运行情况如下:

代码设计的功能,把接收到的报文的ID再次发送出来。接下来测几个报文:
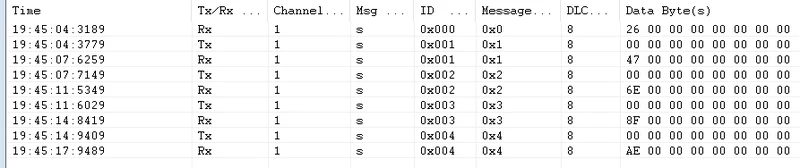
测试了一下,功能正常。
Arduino有一个很好的串口功能,这样我就能够实现一个CAN通信版本的printf了,这个功能后面尝试一下。