
点击上方“大鱼机器人”,选择“置顶/星标公众号”
福利干货,第一时间送达!
作者:稚晖
上一次做磁悬浮还是大二的时候,参加全国电子设计竞赛,做控制组的题目,就是下推式的磁悬浮装置,结果做的还不错拿了特等奖。
最近很多网友在询问毕业设计做什么?刚好这个项目很适合参考。

下推式的磁悬浮的运动原理:
霍尔传感器在浮子的正下方,当检测到浮子向左运动时,两边的线圈一个吸一个拉,把它推向右;反之如果浮子想右运动,那么两个线圈的电流都反向,总共两组共四个这样的线圈,就可以把浮子限制在二维平面之内了。
但是,线圈产生的力是比较小的,因此只能够推动浮子在水平面移动,要克服浮子的重力让它悬浮起来,就要在四个线圈下面再加一个大的环形磁铁提供斥力。
与常见的磁悬浮装置的差异:
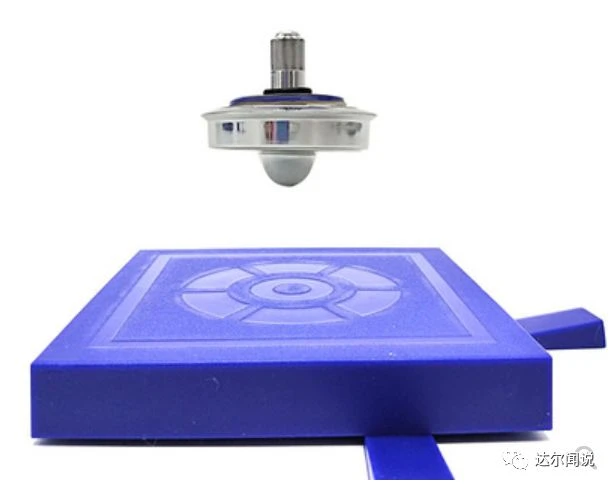
如上图(来自TB),可能有人在淘宝上见过类似的磁悬浮玩具,原理图大同小异,比如这个蓝色的里面其实就是一个大的磁铁提供斥力,但是浮子放上去是不稳定的,所以这种玩具需要借助陀螺高速旋转产生的陀螺仪效应维持平衡。
而我设计的装置是不需要浮子旋转的,放上去就能悬浮,对浮子的限制是靠线圈调节的。
接下来,分享设计中的几个要点:
提前需要准备哪些材料?最重要的几样:
-
Arduino主控板
-
线圈
-
大磁铁
-
霍尔传感器
这几个材料中,重点介绍一下霍尔传感器及线圈:
霍尔传感器,是一种测量磁场强度的元件,可以把通过它垂直面的磁力线强度转化为不同的电压值,这样用单片机ADC读取之后就可以得到浮子的位置信息了。霍尔传感器的安装位置很有讲究,前面说了它是测量通过其垂直面的磁力线,也就是浮子发出的磁力线,而我们电磁线圈在调节的同时磁力线也在变,如果这个变化被霍尔感应到了结果就很不可靠了,所以霍尔的安装位置应该是位于四个线圈的中间高度,这里的磁力线刚好是与霍尔平行,不产生影响。用前后左右共四个线圈,两个霍尔传感器配合,就可以把浮子稳定的悬浮住。

霍尔元件一般需要放大电路放大,但是考虑到对一些初学者比较复杂,大家可以考虑直接到网上买那种线性霍尔元件模块,内置放大的直接接到arduino上就能用,注意一定要线性的!还有一种是开关式的只能输出0和1两个值,我们需要的是输出模拟电压的模块。
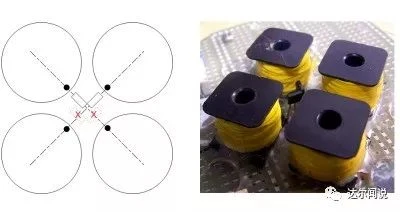
线圈,这个东西买不到,得自己绕制,去网上买一大卷漆包线就可以了,用支架自己绕上2,3百圈基本就够用。这是我绕的样子:

线圈要产生足够的磁力需要更大一点的电压电流,只用Arduino的5v电压是肯定不够的,我使用的是电脑显示器的电源适配器,最大有12V4A,大家可以自己去网上找找相关的电源适配器,应该不难买的。
如何增加装置稳定性?PID算法或不可缺
为了让悬浮更加稳定,采用了PID控制的平衡算法,对PID算法的了解有助于我们对整个实验原理的理解。
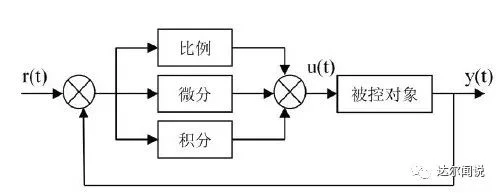
在工程实际中,PID控制是应用最为广泛的调节器控制机制。PID控制中的P代表比例,即proportion;I代表积分,即integral;D代表微分,即differential;因此,PID控制即比例-积分-微分控制。
当被控对象的结构和参数不能完全掌握,或者得不到精确的数学模型时,其他的控制方法难以采用,那么控制器的结构和参数必须结合经验和现场调试来决定,在这种情况下采用PID调节最为方便——
首先,比例控制是一种最简单的控制方式,就像胡克公式中的比例系数一样,当控制器的输出与输入信号成比例关系,那么就可以得到一个比例系数。
其次,积分控制是指控制器的输出与输入的误差信号的积分有关。就如同电路中的电感元件,某个时刻的电压与电流的积分有关。类似的,有时候信号的输出必须综合之前信号的输入,而这种综合往往是求和关系,因此使用积分控制简单易行。
最后,微分控制是指控制器的输出与输入信号的微分有关。最简单的微分关系就是速度是位矢的微分。
我们在控制悬浮物的平衡时,光知道悬浮物偏离平衡位置的位移从而采用比例控制是不够的,对于同样的偏离位移,悬浮物可能有不同的速度,那么要求我们对悬浮物有不同的处理方法,而恰恰速度是位矢的微分。
于是我们可以通过对位移输入数据进行微分操作,来实现对悬浮物的精确实时控制。可见,PID控制器是一种那个动态的控制机制。
以上就是实现下推式磁悬浮的基本原理,借助这些基本原理,结合一定的软件算法实现,我们就可以对悬浮物进行动态控制。
看不懂的可以不管那些废话...总之就是我们把霍尔元件度数也就是浮子的位置作为输入变量输入PID函数,设定一个目标值也就是浮子在中间位置时的读数值,然后把输出赋值给PWM驱动线圈,剩下的就是调整PID参数让它自己控制浮子去啦。
电路难不难?其实电路并不复杂,给一个简化的版本:
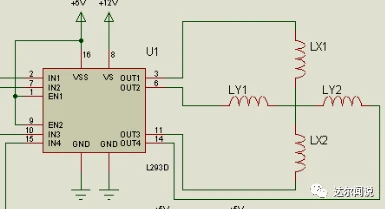
这是电源和线圈连接的方式,网上也有很多例程,霍尔用analogRead()读取,PID有arduino的相关库。
当时我是采用Arduino来做的这个项目,用过Arduino的都知道,它是没有定时器中断的,所以在控制项目中,哪怕是很简单的PID算法,都是无法做到精确地固定周期运行。
当然Arduino也有它的好处,就是利用各种方便的库函数进行快速的原型验证。整个装置其实并不复杂,不过是需要控制几个ADC读取霍尔传感器,输出几个PWM控制线圈,中间加点控制算法而已。
经典如PID,对于这种低阶系统其实完全够用了,所以当时经过参数的优化之后,整体的运行效果也还可以接受。
只是追求完美主义的我,在去年又再次改进了这个装置,做了上拉式功能,主控换成了性能强很多的STM32F103C8T6,采用了更复杂的控制算法,最终的悬浮效果非常理想。如果感兴趣,可以下次接着跟大家分享。
资料获取:更新后的磁悬浮原理图开源给大家参考,关注“大鱼机器人”微信公众号,并回复“磁悬浮”获得。

大家好,我是张巧龙,一名电子技术爱好者,会写一些关于硬件与软件结合的技术文章,若觉得文章对你有帮助,转发分享,也是我们继续更新的动力。
 长按识别图中二维码关注
长按识别图中二维码关注