
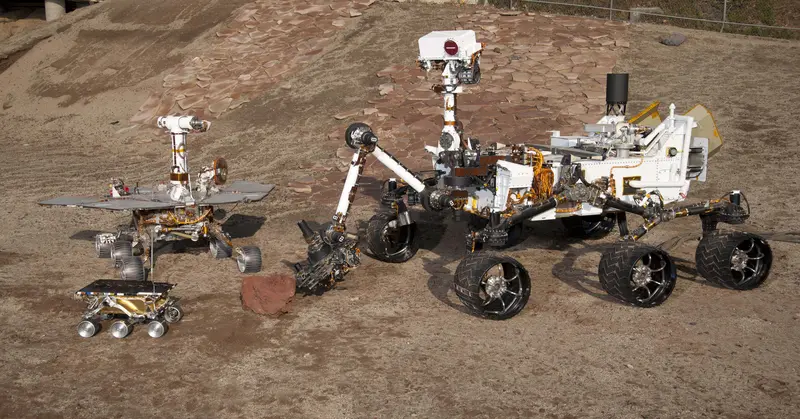
美国先后发射了索杰纳号(Sojourner)、勇气号(Spirit)、机遇号(Opportunity)、好奇号(Curiosity)四个漫游车(Rover)到火星。几个火星车如下图所示,其中最小的是索杰纳号(左下),最大的是好奇号(右侧),居中的是勇气号(或机遇号,它们是双胞胎)。
一个重要的问题是:这些火星车采用了什么样的移动机构?
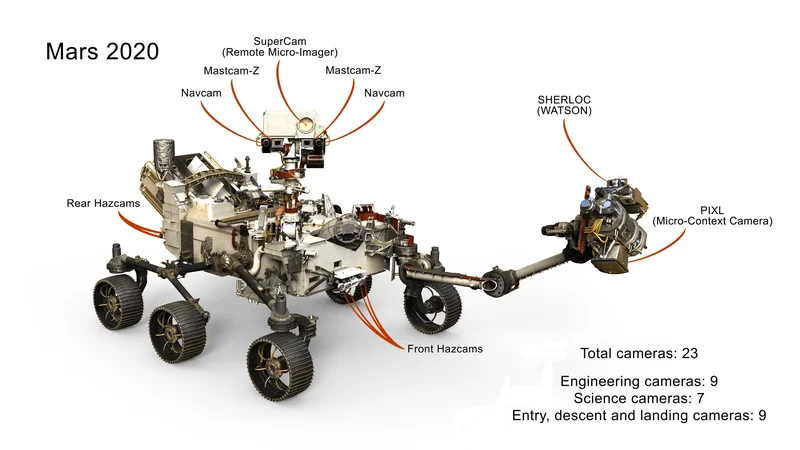
从外表上看,火星车的移动机构与其它车辆或机器人相比有明显的特征。这几个火星车的移动机构差不多,我以好奇号为例进行解释。好奇号如下图所示,它有6个轮子。火星上的地面崎岖不平,布满砂石,所以火星车必须具有很好的运动灵活性和适应能力。好奇号的底盘离地非常高,比越野车的底盘还要高,所以能通过高度变化很大的地区。为了能够在不平整的地面流畅地行驶,很多车辆都有悬挂装置。例如,家用汽车和卡车一般采用弹簧或者板簧作为悬挂机构中的弹性器件;更重的车辆,例如坦克、装甲车则采用扭杆作为悬挂装置;而特别重的车辆,例如大型平板车、重型起重机则采用液压油缸作为悬挂装置。我们知道,三点确定一个平面,而汽车至少有4个车轮。如果没有悬挂装置,车辆在不平地面行驶时必然有一个车轮接触不到地面。悬挂装置的一个作用是减轻颠簸地面的冲击。但是,好奇号没有使用上述任何一种悬挂装置,因为它的速度非常缓慢,每分钟只能走几十厘米,所以没有使用弹簧等弹性器件;悬挂装置的另一个作用是让所有的车轮都能接触到地面,使负载均匀得分散给各车轮。为了使6个轮子都能接触地面,好奇号采用了一种很巧妙的铰链机构。在重力作用下,通过关节的转动使所有轮子都能接地。
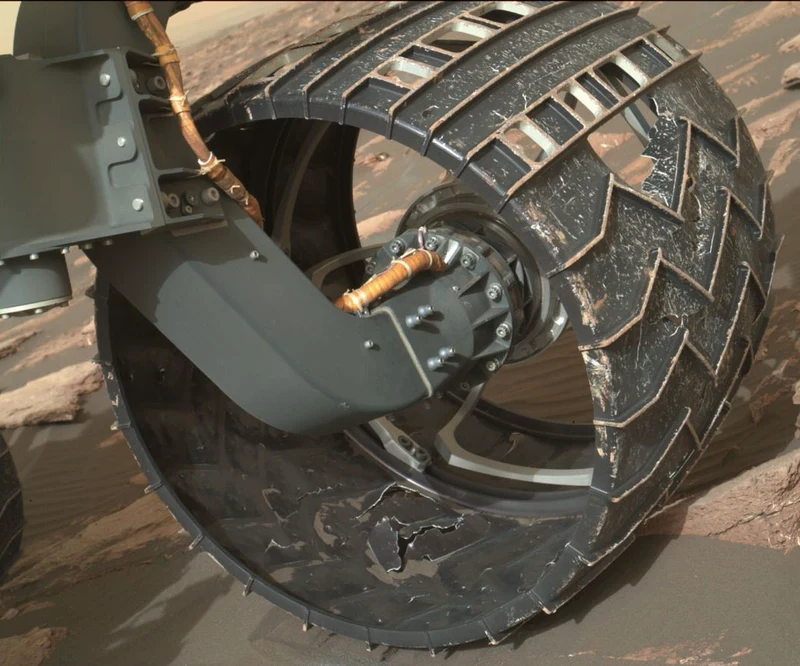
为了使好奇号具有很强的爬坡能力和越障能力,它的6个轮子全都能独立提供驱动力(六轮独立驱动),如下图所示。但奇怪的是,从图中我们找不到驱动电机在哪里。
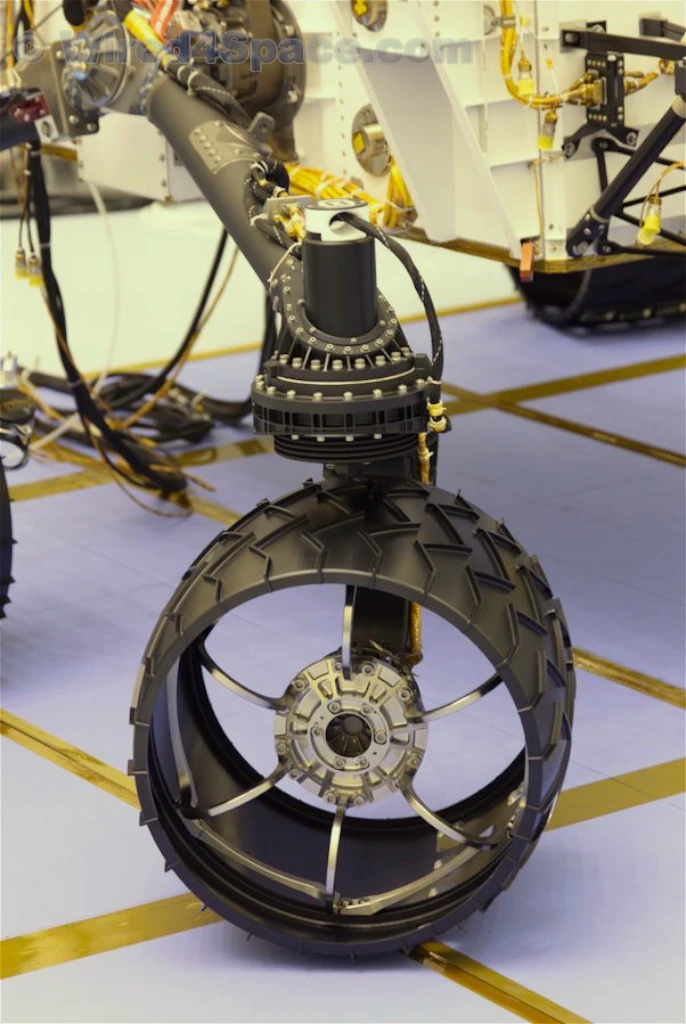
其实,好奇号的驱动电机做的非常小巧,它直接装在了轮子的轮轴处,如下图所示。我们看不出电机的型号,可能是为此专门设计的电机。这样的电机安装方式就是传说中的轮毂电机,即电机装在车轮轮毂中。这样显然更节省安装空间,车辆底盘高度不必受到车轮轮轴高度的限制。

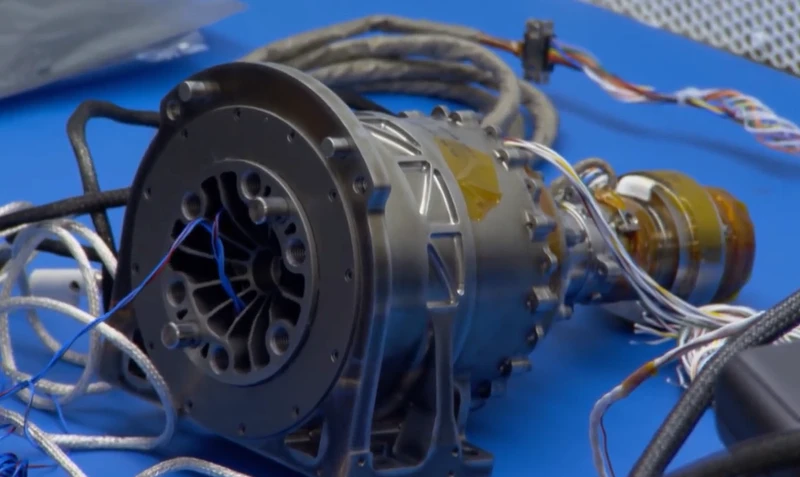
为了驱动车轮,需要将电机的输出力矩进行放大,为此好奇号使用了齿轮减速器,如下图所示。减速器由三个行星减速齿轮组构成,具有2000:1的减速比,因此输出的力矩很大,但是速度很慢。

火星车对运动灵活性有很高的要求,例如要能原地旋转。因此,好奇号的前后轮都可以独立转向(四轮独立转向),如下图所示。共四个轮子用来转向,因此需要4个转向电机。转向电机的转动轴一定通过轮子接地面的中心,这样转向时阻力最小,也不会带动整车一起转动。由于中间两个轮子不能转向,因此好奇号无法直接侧移(像螃蟹一些横着走)。由于好奇号的每个轮子都能独立控制,在转向时每个轮子的转速是不同的,必须控制好每个轮子的转速,使其协调,否则有的轮子快、有的慢,这样轮子就会相互拖拽(俗称打架)。对于四轮独立驱动的汽车来说,也存在这个问题。而普通汽车采用了差速器,因此不存在这个问题,其控制很简单。

你可以在NASA的官网上找到好奇号火星车的三维模型,是用Blender制作的。
模型在这里下载:https://nasa3d.arc.nasa.gov/detail/curiosity-clean

---------------------
作者:robinvista
来源:CSDN
原文:https://blog.csdn.net/robinvista/article/details/79782178
版权声明:本文为作者原创文章,转载请附上博文链接!