
一、“根”的作用
“根”与系统中的“极点”相同。
拿一阶系统为例:
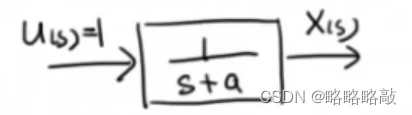
则:
令:

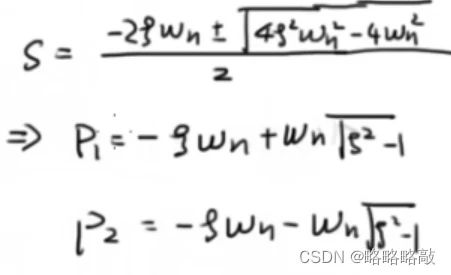
即,得根为:

对x(s)进行Laplace逆变换,可得时间函数为:
 ,其中-a就是函数的“根”。
,其中-a就是函数的“根”。
若a>0,则函数图像为指数衰减的形式:
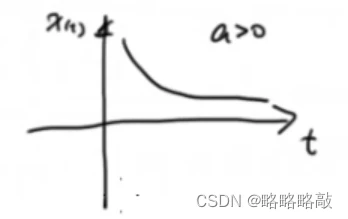
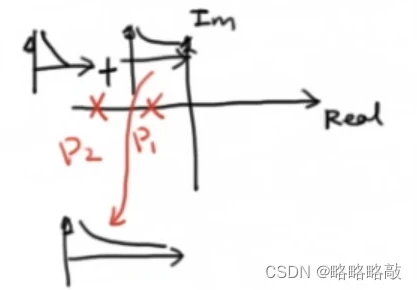
对于一般的一阶系统而言,若用复平面表示其系统的根,那一定落在实数轴上。
一阶系统中很多指标与“根”都息息相关,如时间常数、稳态时间等。
再拿二阶系统为例:
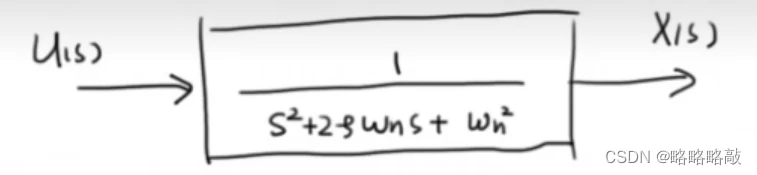
其中:固有频率:
阻尼比:

x(s)输出为

令分母为0,则:
分类讨论:
i.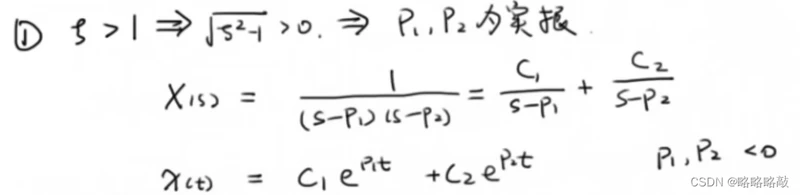
其系统图像:可看作两个一阶系统相加,有收敛程度缓的 决定最终图像。
决定最终图像。
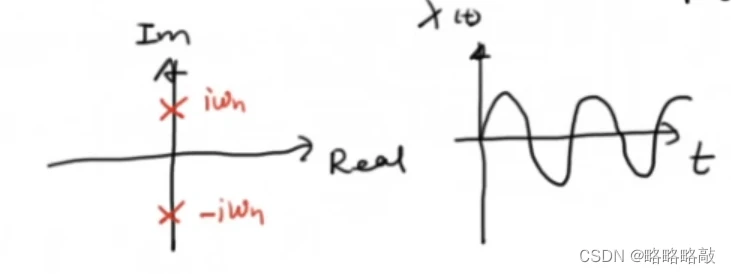
ii.
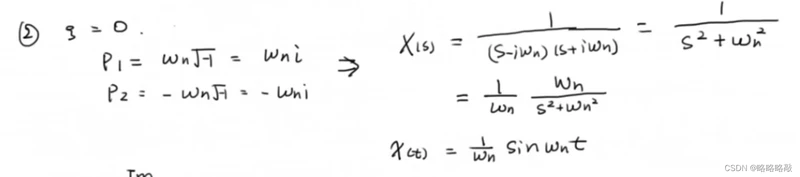
其系统图象:以 为频率的振荡图像
为频率的振荡图像
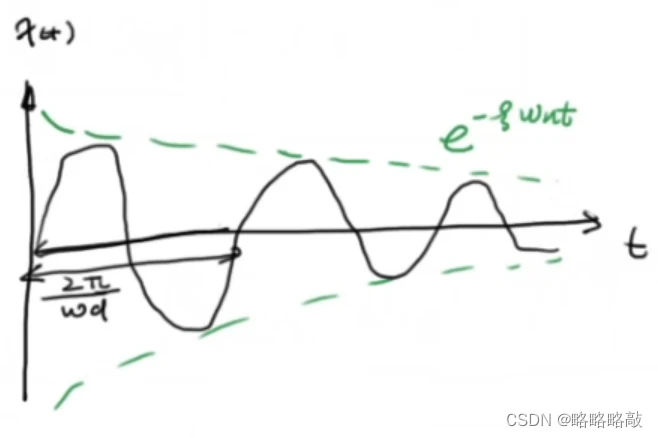
iii.
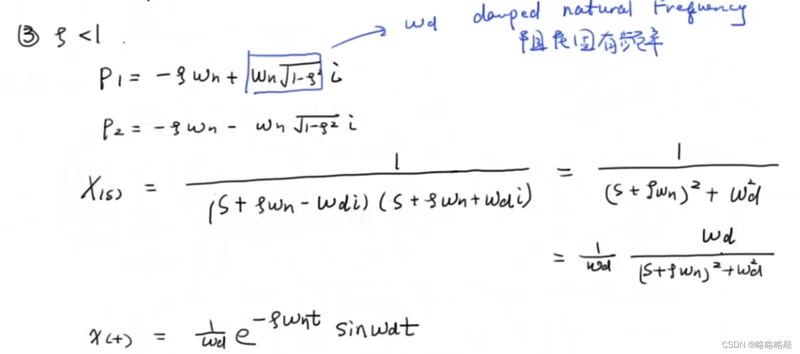
其系统图像:以 为渐近线的振荡图像
为渐近线的振荡图像
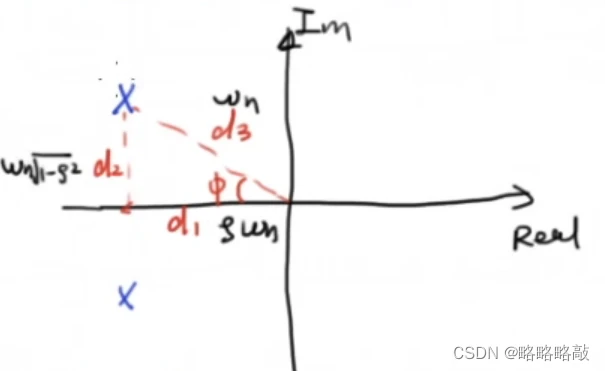
复平面图像:
二、“根”的手绘技巧
重点:

根轨迹的基本形式:
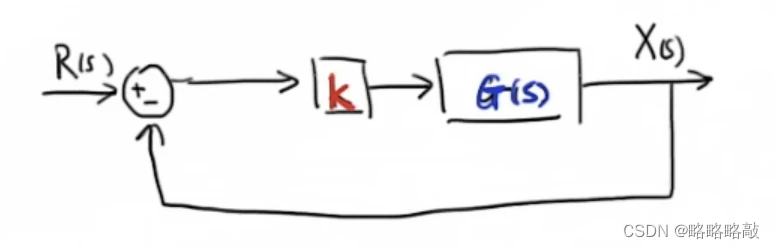
其传递函数表示为:其中我们研究的便是传递函数中的分母“ ”时的根,当k从0到+
”时的根,当k从0到+ 时,闭环系统根位置变化的规律。
时,闭环系统根位置变化的规律。
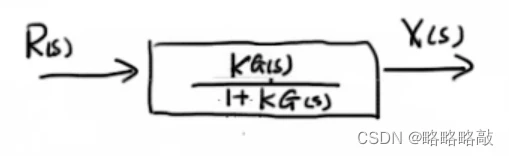
其中,我们是通过研究G(s)开环函数来对 的根进行分析。
对以下:
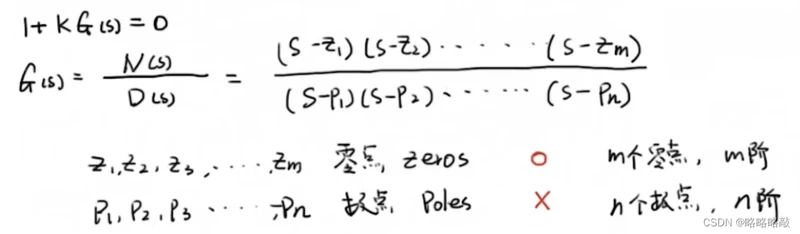
规则一:若m>n,则有m条根轨迹,
若n>m,则有n条根轨迹。
Eg:

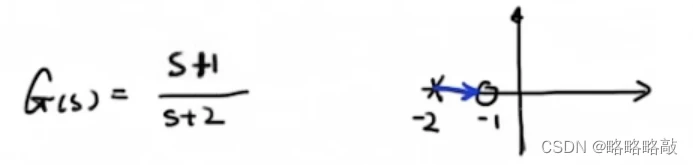
规则二:当m=n时,随着k从0到+,根轨迹从G(s)的极点向零点移动。即:

Eg:
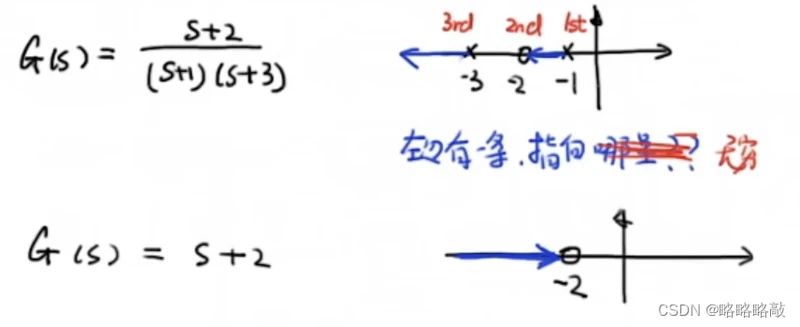
规则三:实轴上的根轨迹存在于从右向左数第奇数个极点/零点的左边
Eg:

规则四:若复数根存在,则一定是共轭的,所以根轨迹通过实轴对称。
规则五:若n>m,则有n-m个极点指向
若n<m,则有m-n条根轨迹从指向零点
Eg:
规则六:根轨迹沿渐近线移动,渐进性与实轴的交点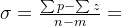
渐近线与实轴的夹角,其中

Eg:
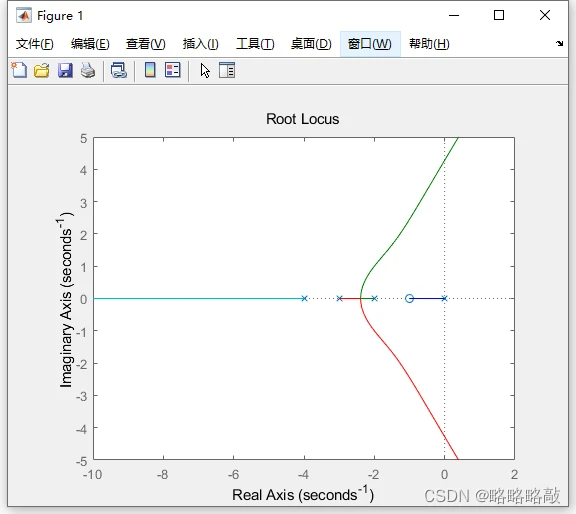
用MATLAB绘制根轨迹:
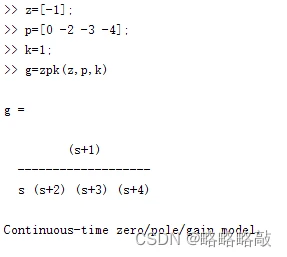
成功列出关于g的函数后,用rlocus()语句进行根轨迹的绘制,如:

则,根轨迹绘制图像:
三、分离点/汇合点&根轨迹的几何性质
分离点/汇合点
定义:根轨迹在实轴上的汇合/分离的点则为汇合/分离点。
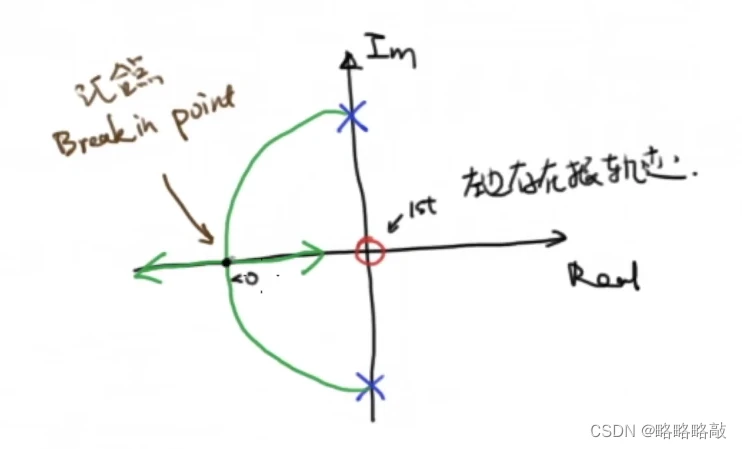
可通过求得系统中的极值来求得汇合点/分离点,其中最大值对应的是分离点,最小值对应的是汇合点。
根轨迹的几何性质
看以下例子:
其中: 为零点长度,
为零点长度, 、
、 为极点长度,
为极点长度, 为零点幅角,
为零点幅角, 、
、 为极点幅角(复数图像与x轴正方向形成的角度)。
为极点幅角(复数图像与x轴正方向形成的角度)。
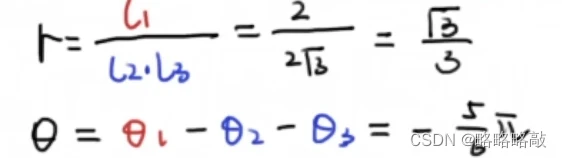
G(s)的模为:
r=(所有零点长度的积)/(所有极点长度的积)
G(s)的幅角为:
 =所有零点幅角的和 - 所有极点幅角的和
=所有零点幅角的和 - 所有极点幅角的和
如以上的例子中:
以上就是根轨迹的几何性质,可用于一个根轨迹中,判断一个根在根轨迹上,亦可以设定一个根加到这个根轨迹上。